This season, I was hired to lead a club consisting of 4 FTC teams, creating a new introductory curriculum and helping the students through the challenges of a season.
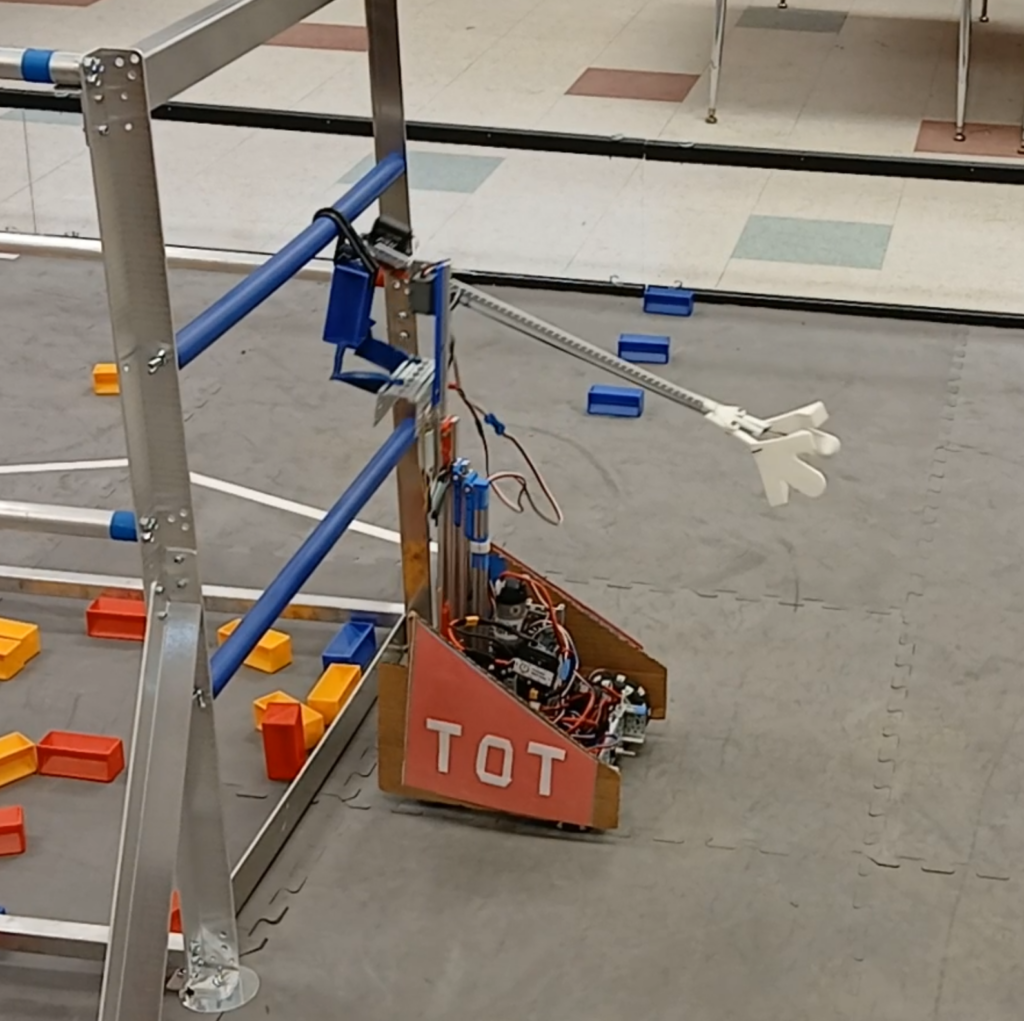
TOT BOT
With a more complicated game that requires reaching into an area and lifting game pieces (“samples”) and hanging pieces on a bar (“specimens”), I had to up my game over the previous season’s Baby Bot. The philosophy remained the same: creating the simplest, lightest, and smallest robot that is still competitive at least in the early competitions. I challenged myself to solo-build a robot that can score in all aspects of the game using just 1 control hub, limiting me to just half the number of actuators (motors and servos) that most teams have available. I also limited myself to about 12 hours for the initial build and programming, roughly 2 weeks worth of meetings for the student teams.
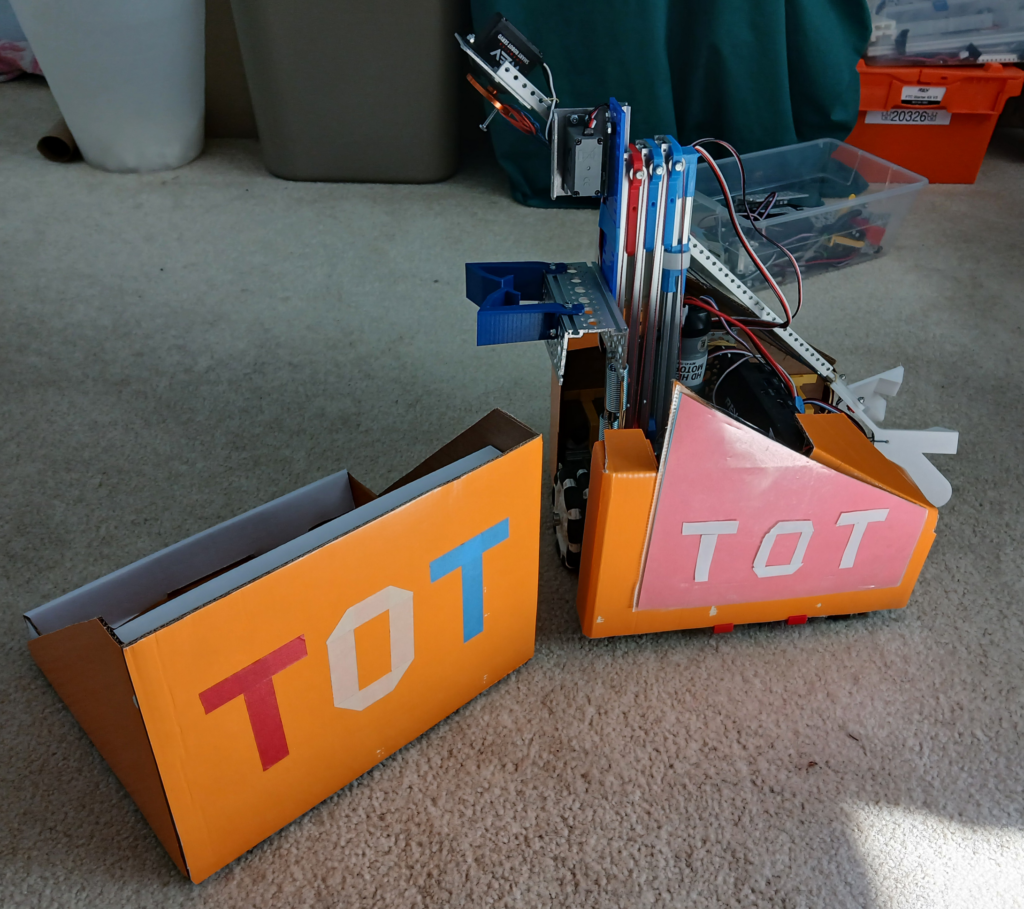
Since this year’s robot was slightly larger and more complex than Baby Bot, we named it TOT BOT.
Features
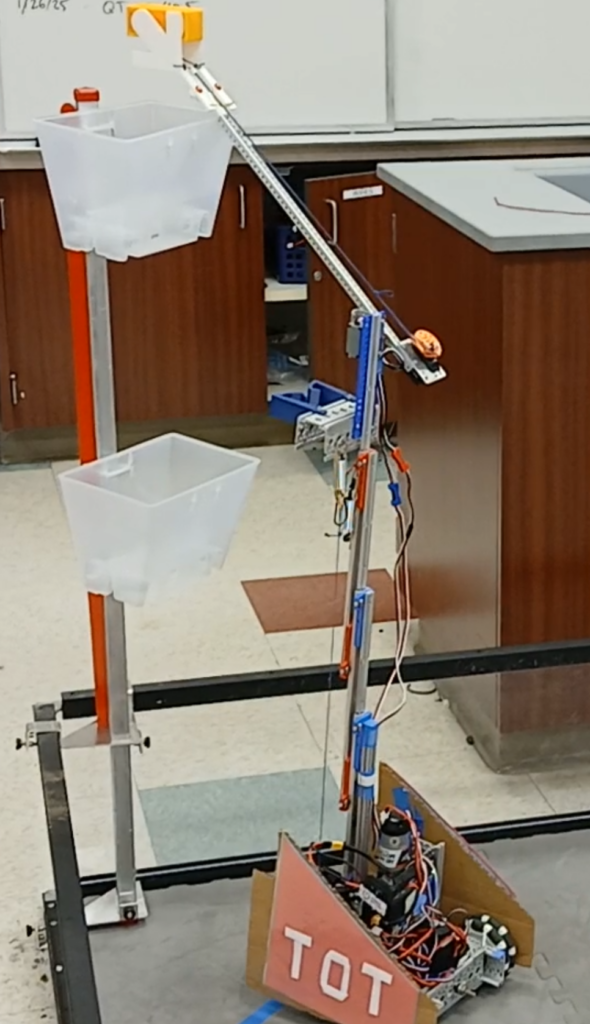
- Single-set of Misumi slides: much faster/simpler to assemble and tension the strings compared to 2 parallel sets, but not nearly as strong or sturdy. As a result, the base robot and any attachments must be much lighter.
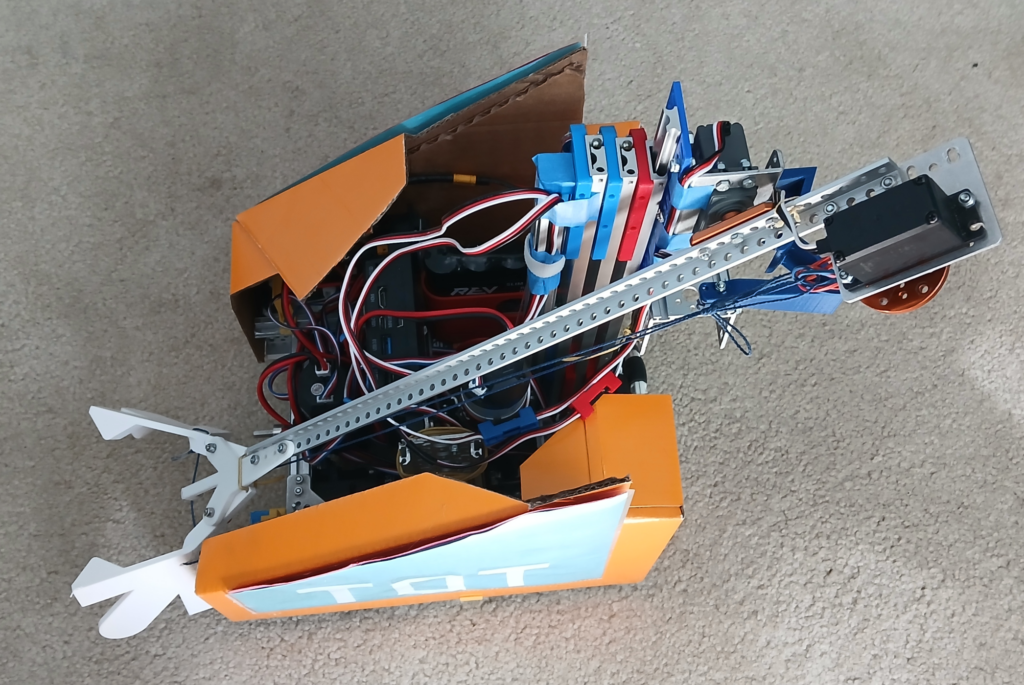
- Dual-sided claw: allows intake/outtake on both sides of the robot, eliminating the need to turn around 180° twice per item scored
- Counterbalanced arm/claw: powered by a string-based mechanism inspired by grab claw toys. The servo controlling the claw and claw are on opposite sides of the pivot point, such that the entire arm can be rotated using a single servo. (In contrast, most teams use a servo directly attached to the claw or near the claw, which increases weight of the intake)
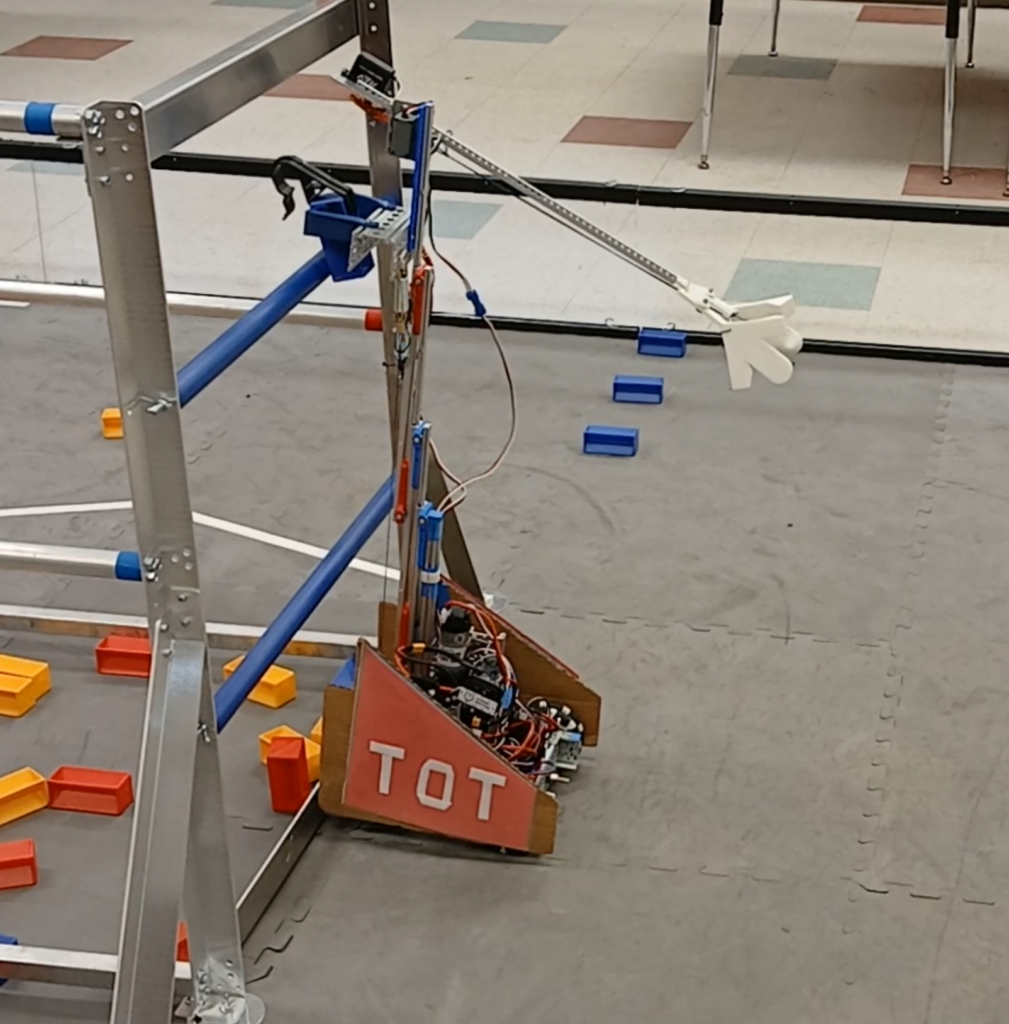
- Servoless/passive specimen system: Uses a TPU claw custom designed to grab specimens from the front easily, then resist with a downward force when hanging them. No additional motors or servos are required, making it very durable and lightweight (<20g).
- H-Drive: 3-motor drivetrain uses omni wheels to drive forward/backward, turn, and strafe (drive sideways). This improves maneuverability over a simple dual-wheel drive that cannot strafe, but uses one fewer motor compared to mecanum drive robots that are common in the modern game.
- Hanging: The robot can do a “pull up” by clipping a metal channel on the linear slides onto a bar. 1 motor is sufficient to hang the robot because of the small size and light weight.
- <10″ wide drivetrain: gives drivers more room for error when driving in tight spaces on the field.
- Swappable alliance markers: built in just minutes using white tape, sheet protectors, and colored paper.